CADDY Caddian gloves
Caddian Gloves
 |
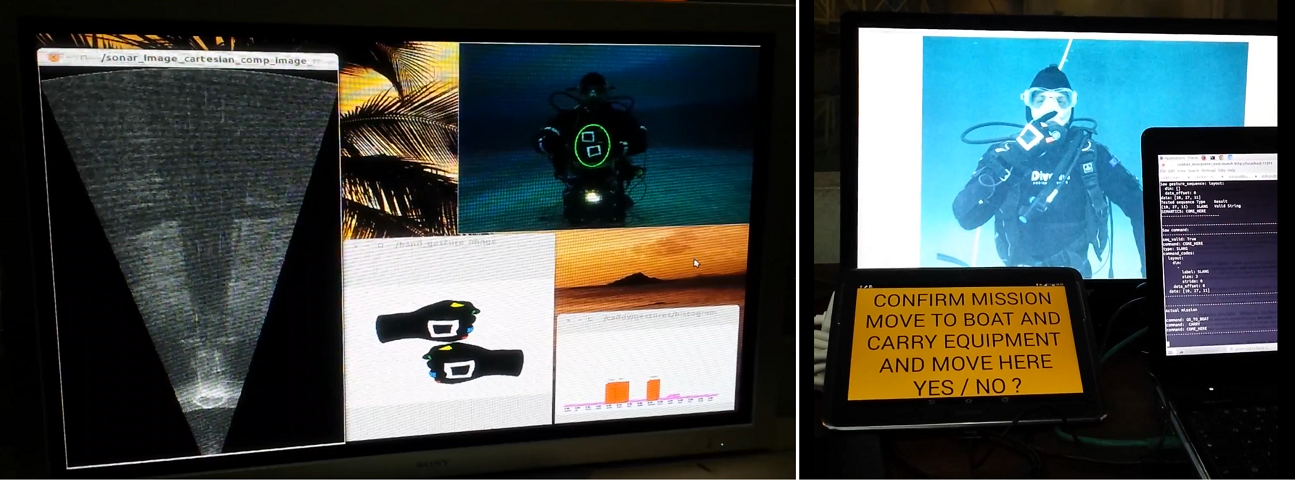
Caddian gloves are gloves used during most of the CADDY Project Trials to issue Caddian gestures. These gloves emerged as a strategic addition to our project methodology, particularly after the inaugural year, to enhance gesture recognition by Autonomous Underwater Vehicles (AUVs).
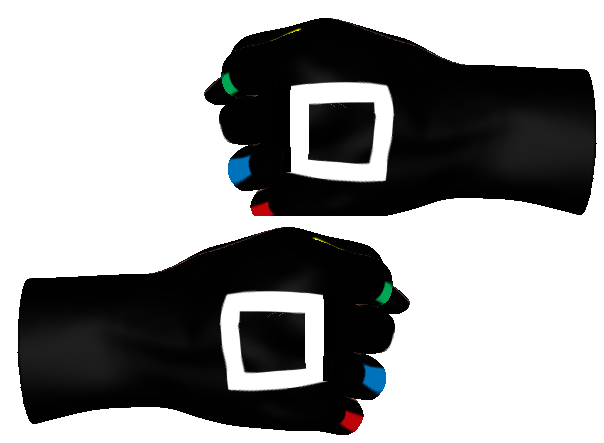
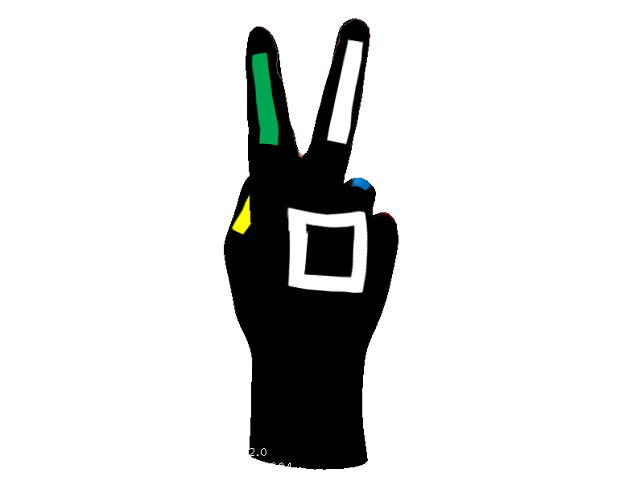
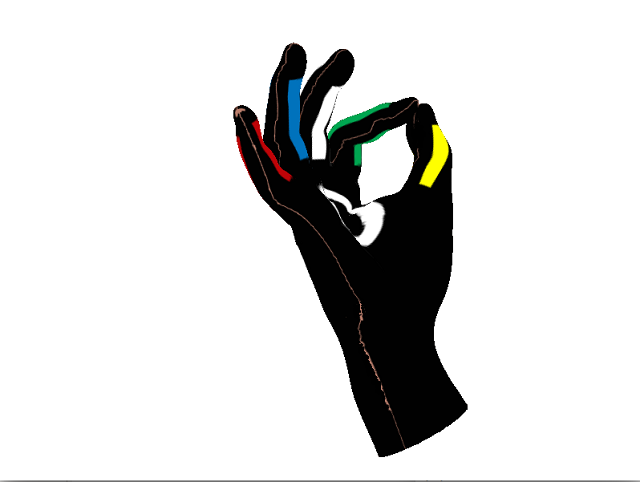
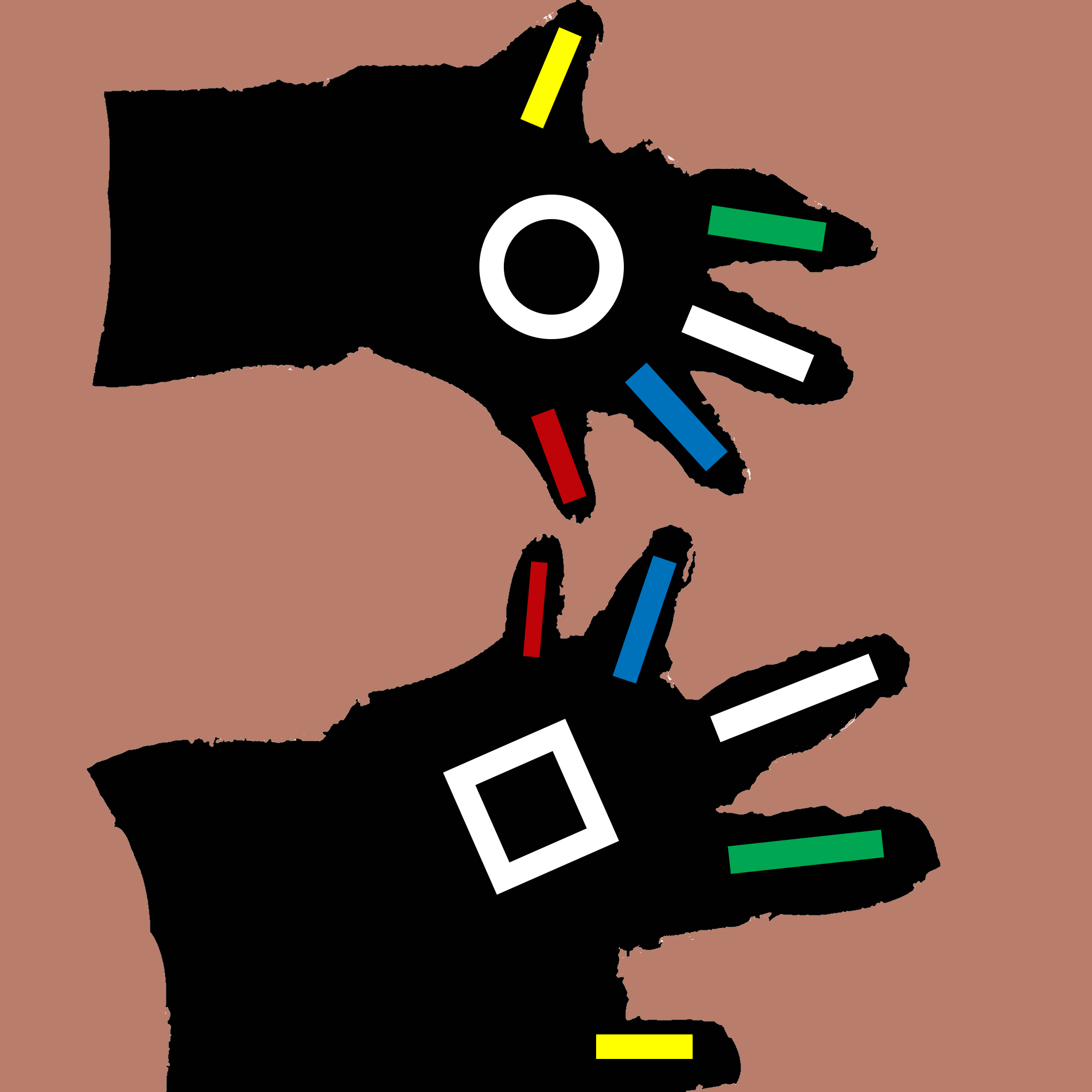
At the heart of the Caddian Gloves is a thoughtful design process, evident in the images available for your exploration. Originating from commercial diving gloves, we have meticulously modified them by incorporating custom white shapes on both the front and back surfaces. Key design features include a distinctive white circle on the palm and a corresponding square on the back. Adding both functionality and a visual identity, colored thick lines adorn each finger. This deliberate choice of color serves a dual purpose, combining aesthetics with practicality:
| Thumb: Yellow (RGB: 245,245,100) | Index: Green (RGB: 0,166,81) | Middle: White (RGB: 255,255,255) | Ring: Light Blue (RGB: 0,114,188) | Pinky: Red (RGB: 190,4,8) |
| External square: 6cm x 6cm | Internal square: 4cm x 4cm | |||
| External circle diameter: 5.5cm | Internal circle diameter: 3.5cm |
In the table below, , you can find the texture file for these gloves. It can be seamlessly integrated with Libhand (http://www.libhand.org/) to create a dynamic gesture viewer, as exemplified in the images on this page and showed in 1.
Images
 |
 |
 |
 |
 |
 |
 |
 |
Citations
-
Chiarella, D. Towards Multi-AUV Collaboration and Coordination: A Gesture-Based Multi-AUV Hierarchical Language and a Language Framework Comparison System. J. Mar. Sci. Eng. 2023, 11, 1208. https://doi.org/10.3390/jmse11061208 [online version],[BibTex], [RIS]
-
A. Gomez Chavez, A. Ranieri, D. Chiarella and A. Birk. Underwater Vision-Based Gesture Recognition: A Robustness Validation for Safe Human–Robot Interaction. IEEE Robotics & Automation Magazine, vol. 28, no. 3, pp. 67-78, Sept. 2021, doi: 10.1109/MRA.2021.3075560.
-
Gomez Chavez, A.; Ranieri, A.; Chiarella, D.; Zereik, E.; Babić, A.; Birk, A. CADDY Underwater Stereo-Vision Dataset for Human–Robot Interaction (HRI) in the Context of Diver Activities. J. Mar. Sci. Eng. 2019, 7, 16. [online version], [PDF], [BibTeX], [RIS].
-
Chiarella, D.; Bibuli, M.; Bruzzone, G.; Caccia, M.; Ranieri, A.; Zereik, E.; Marconi, L.; Cutugno, P. A Novel Gesture-Based Language for Underwater Human–Robot Interaction. J. Mar. Sci. Eng. 2018, 6, 91. [PDF], [BibTeX], [RIS]
Video
Quick links
Please cite the papers above if you make use of the texture or Caddian language and dataset in your research.
| Glove texture – 16MB |
{kind=link}
Changelog
- 12.02.2024 Caddian Gloves Page online.
For any inquiry about the Caddian Gloves please contact Davide Chiarella at davide.chiarella@cnr.it